Next: Bottom-up Clustering Techniques Up: Speaker Diarization Previous: Speaker Diarization Contents
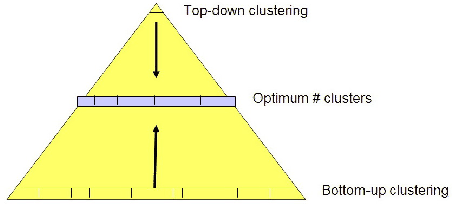
Most of the reviewed offline clustering algorithms use hierarchical schemes, where speech segments or clusters are iteratively split or merged until the optimum number of speakers is reached. In figure 2.1 a pedantic abstraction of the two mostly used techniques in speaker clustering is shown. Bottom-up clustering systems are those which start with a big number of segments/clusters and via merging techniques converge to the optimum amount of clusters. On the other hand, top-down systems usually start with one or very few clusters and work its way up (in the number of clusters, down in the figure) via splitting procedures to obtain the optimum amount. In the design of either system, two items need to be defined:
Classified by the type of clustering, the following are the most representative techniques described in the literature: